UniDex: A Robot Foundation Suite for Universal Dexterous Hand Control from Egocentric Human Videos



Abstract
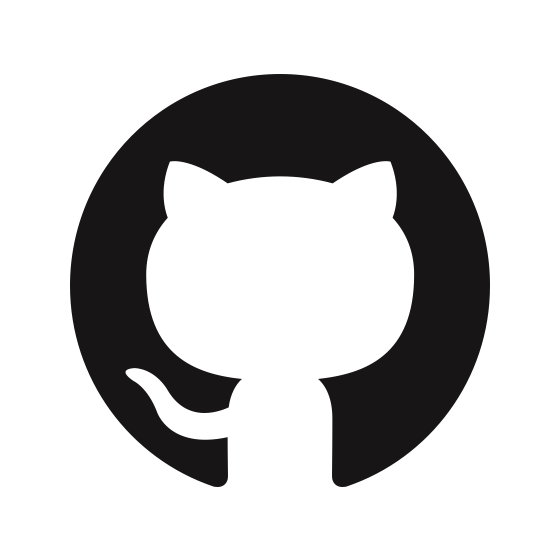
Dexterous manipulation remains challenging due to the cost of collecting real-robot teleoperation data, the heterogeneity of hand embodiments, and the high dimensionality of control. We present UniDex, a robot foundation suite that couples a large-scale robot-centric dataset with a unified vision-language-action policy and a practical human-data capture setup for universal dexterous hand control. First, we construct UniDex-Dataset, a robot-centric dataset over 50K trajectories across eight dexterous hands derived from egocentric human videos. To transform human data into robot-executable trajectories, we employ a human-in-the-loop retargeting procedure to align fingertip trajectories while preserving plausible hand-object contacts. Second, we introduce FAAS, a unified action space that maps functionally similar actuators to shared coordinates, enabling cross-hand transfer, and train UniDex-VLA, a 3D VLA policy pretrained on UniDex-Dataset and finetuned with task demonstrations. In addition, we build UniDex-Cap, a portable setup for human-robot data co-training that reduces reliance on costly robot demonstrations.
Overview
UniDex-Dataset
Transform egocentric human videos into robot data with human-in-the-loop retargeting, producing a scalable robot-centric dexterous dataset.
FAAS + UniDex-VLA
Learn a unified dexterous VLA in a shared function-actuator-aligned action space for tool use and robot hand generalization.
Tool-Use Tasks
Evaluate dexterous manipulation on real-world long-horizon tasks including coffee making, sweeping, watering flowers, cutting bags, and using a mouse.
Zero-Shot Cross-Hand Transfer
Transfer policies across dexterous hands with different kinematics and DoFs through FAAS and diverse pretraining.
UniDex-Cap
Capture synchronized human demonstrations with a portable setup and convert them into robot-centric trajectories for co-training.
UniDex-Dataset
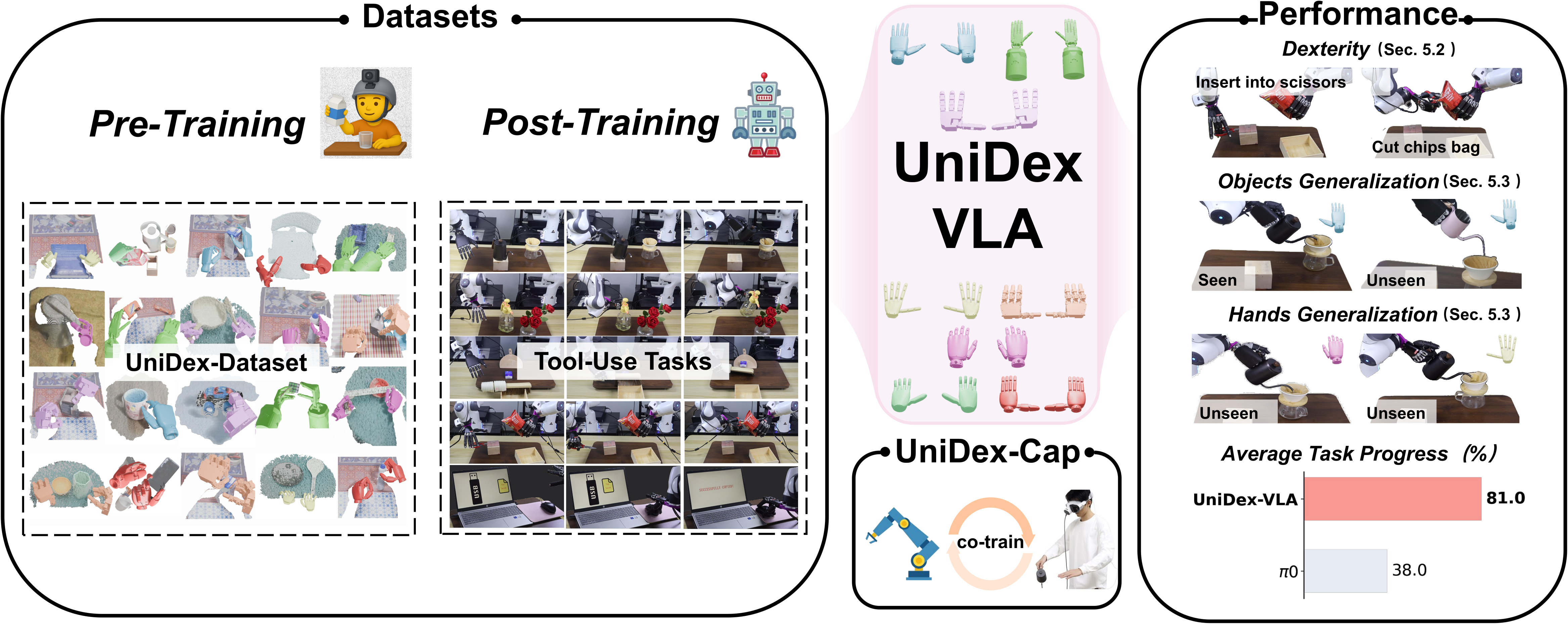
UniDex-Dataset focuses on converting large-scale human data into robot data. The key step is human-in-the-loop retargeting: human fingertip trajectories are aligned to robot hands with interactive adjustment so that the resulting robot executions preserve physically plausible contacts. This turns egocentric human manipulation videos into robot-executable dexterous trajectories suitable for large-scale pretraining.
Dataset Video

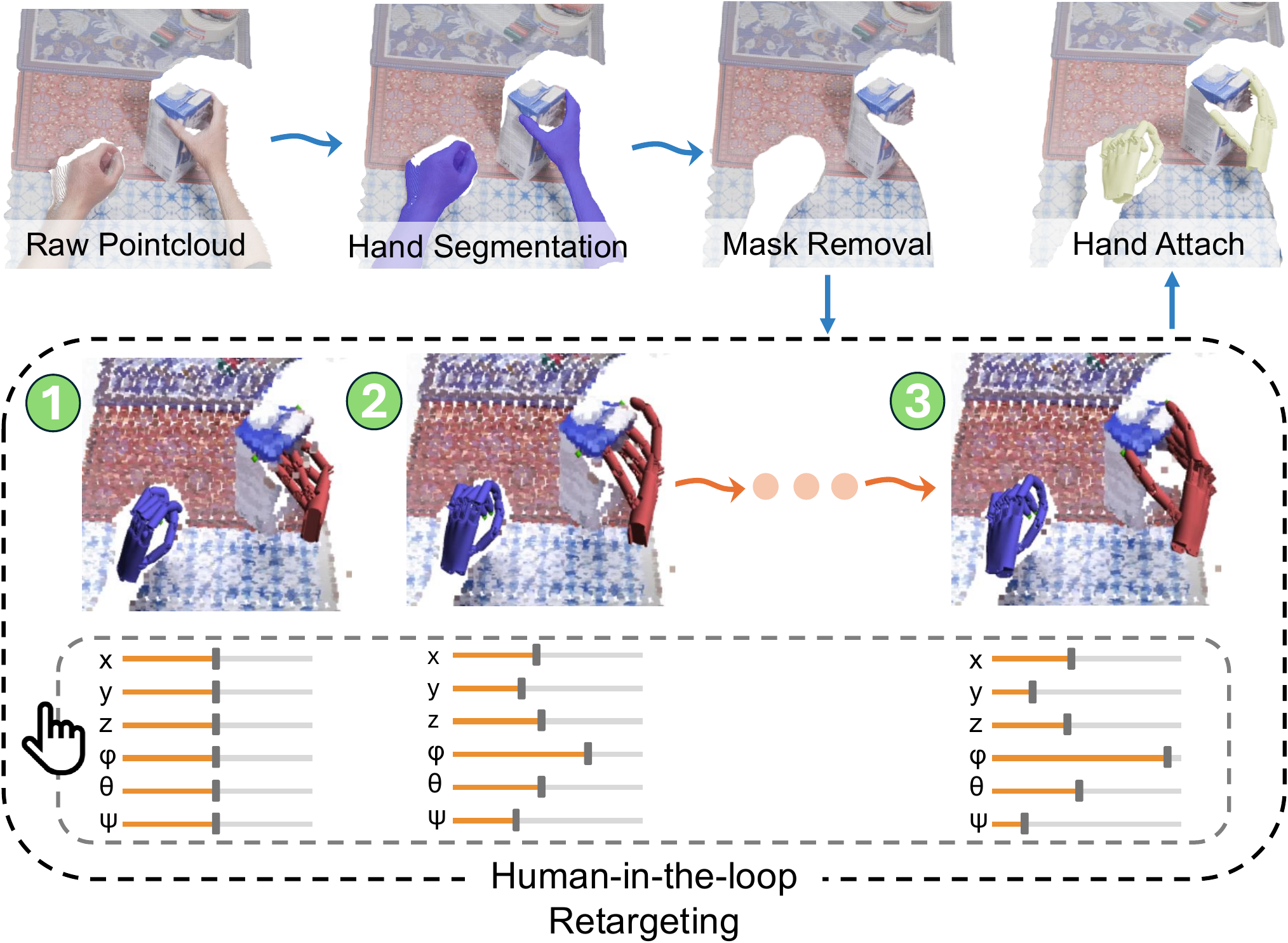
8 hands, over 50k trajectories, and 9M paired image-pointcloud-action frames.
Human-in-the-Loop Retargeting
Human Data
Robot Data
FAAS + UniDex-VLA
FAAS
FAAS maps actuators with the same functional role to shared coordinates, enabling transfer across dexterous hands with different kinematics and DoFs.
UniDex-VLA
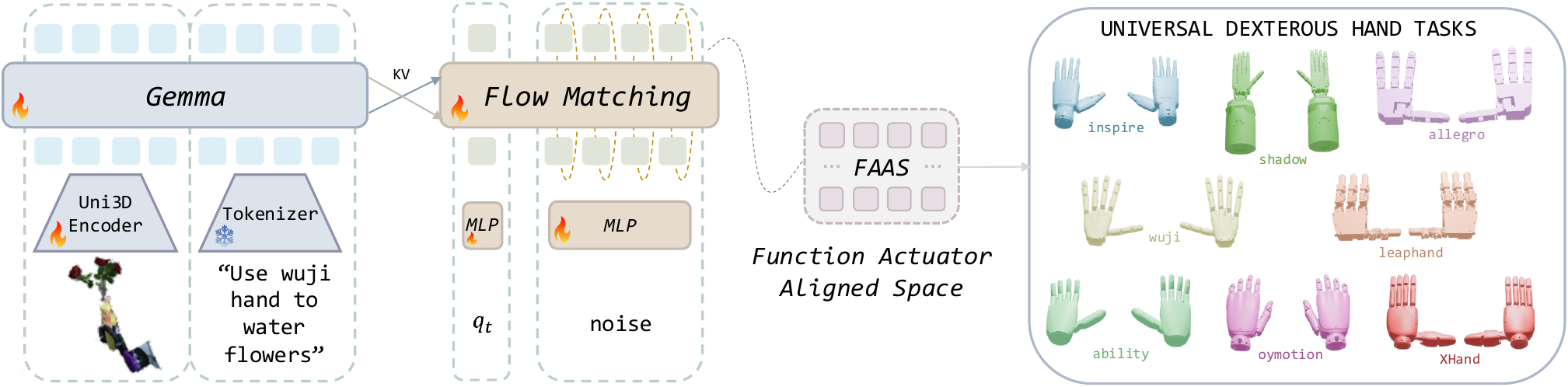
UniDex-VLA is a 3D vision-language-action policy that takes pointcloud observations, language instructions, and proprioception, and predicts dexterous action chunks in FAAS.
Tool-Use Tasks
Generalization
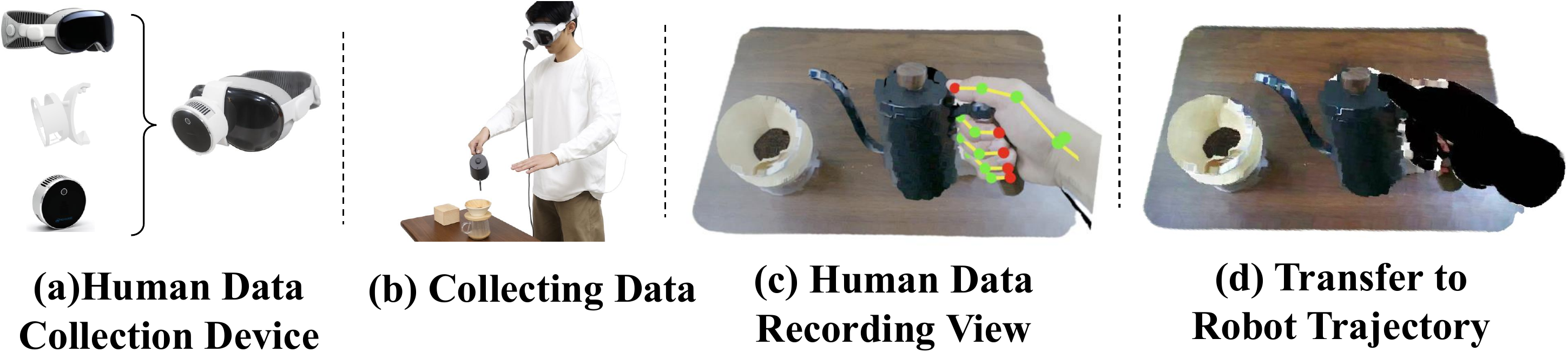
UniDex-Cap
UniDex-Cap is a portable human data capture setup that records synchronized RGB-D streams and hand poses, then converts them into robot-executable trajectories through the same transformation pipeline. It can be used to collect human data for human-robot data co-training.
BibTeX
@@article{zhang2026unidex,
title={UniDex: A Robot Foundation Suite for Universal Dexterous Hand Control from Egocentric Human Videos},
author={Zhang, Gu and Xu, Qicheng and Zhang, Haozhe and Ma, Jianhan and He, Long and Bao, Yiming and Ping, Zeyu and Yuan, Zhecheng and Lu, Chenhao and Yuan, Chengbo and others},
journal={arXiv preprint arXiv:2603.22264},
year={2026}
}